Des détails précis:
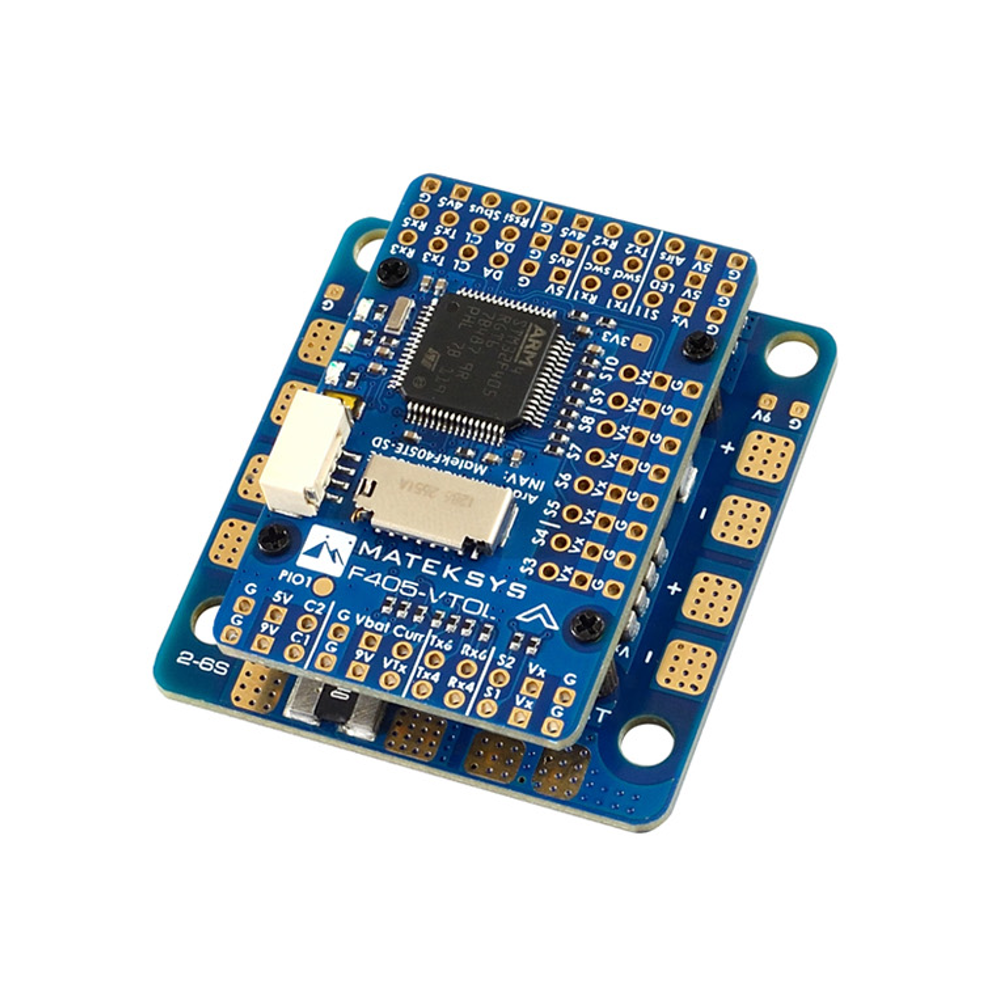
Spécifications FC
MCU: STM32F405RGT6, 168MHz, 1MB Flash
IMU: ICM42688-P
Baro: SPL06-001
OSD: AT7456E
Boîte noire : emplacement pour carte MicroSD
6x UART, 1x option Softserial_Tx(INAV)
12x Sorties PWM
1x I2C
4x ADC (VBAT, Courant, RSSI, Vitesse de l'air)
1x PINIO de rechange
Extension USB/Beep avec Type-C(USB2.0)
Convertisseur intégré sur UART2-RX pour entrée SBUS
Entrée double caméra commutable
FC Firmware
ArduPilot: MatekF405-TE
INAV : MATEKF405TE_SD (INAV 5.0 ou plus récent)
Firmware pour Contrôleur de Vol Cliquez ici
PDB
Plage de tension d'entrée: 6.8-30V (2-6S LiPo)
Résistance de senseur: 100A continu, 220A crête
5x pads de puissance ESC, total 100A en continu
Prend en charge une charge continue jusqu'à 100A sur le pad ESC près de la résistance du capteur de courant
Prise en charge d'une charge continue jusqu'à 30A et un pic de 50A sur chaque pad ESC du Quadcopter
Diviseur de tension de batterie 1K:20K (Échelle 2100 dans INAV, BATT_VOLT_MULT 21.0 dans ArduPilot)
Capteur actuel : 220A, ADC 3.3V (Échelle 150 dans INAV, 66.7 A/V dans ArduPilot)
Sortie BEC 5V
Conçu pour le contrôleur de vol, le récepteur, OSD, la caméra, le buzzer, la bande LED 2812, le module GPS, l'AirSpeed
Courant continu : 2 ampères
Sortie BEC 9V / 12V
Conçu pour un émetteur vidéo, une caméra, un stabilisateur, etc.
Courant continu : 2 ampères
Option 12V avec pad de cavalier
pour une sortie stable de 9V/12V, la tension d'entrée doit être supérieure à la tension de sortie +1V
Sortie BEC Vx
Conçu pour les servomoteurs
Tension réglable, 5V par défaut, 6V ou 7,2V via cavalier
Courant continu: 8 Ampères, 10A crête
pour une sortie Vx stable, la tension d'entrée doit être supérieure à la tension Vx +1V
Sortie BEC 3.3V
Conçu pour le module baromètre/compas et les périphériques externes 3,3V
Régulateur linéaire
Courant continu: 200mA
Physique
Montage : 25 x 25mm-Φ2mm, 35 x 35mm-Φ4mm
Dimensions : 45 x 42 x 15 mm
Poids : 25g avec adaptateur USB/buzzer
Y compris
1x F405-VTOL
Extension 1x USB (Type-C) / Buzzer passif (bip passif) + câble JST-SH-6P vers JST-SH-6P de 20 cm pour l'extension USB.
Câble 1x 20cm JST-GH-4P vers JST-GH-4P pour port I2C
1x condensateur Rubycon ZLH 35V 470uF
Broches Dupont 2.54 (La carte est livrée non soudée)
Mise en page

Câblage VTOL (ArduPlane)
Câblage normal de l'avion (INAV)
Cartographie INAV
PINIO
PINIO1 /PIO1 pad, niveau bas par défaut, commutable niveau bas/haut par le mode USER1
PINIO2 est utilisé pour basculer l'entrée de la caméra en Modes-USER2
Conseils
F405-VTOL a INAV fw préchargé pour QC
Téléchargez INAV (Cible MATEKF405TE_SD) fw 5.x ou plus récent directement depuis le configurateur INAV 5.x ou plus récent.
Cartographie ArduPilot
Télémétrie Frsky Smartport
signal non inversé (piraté) S.Port
toute Uart_TX de rechange
SERIALx_BAUD 57
SERIALx_OPTIONS 7
SERIALx_PROTOCOL 4 ou 10 (pour yaapu)
DJI FPV OSD (ArduPilot 4.1)
https://ardupilot.org/plane/docs/common-msp-osd-overview.html
OSD_TYPE = 3
SERIALx_PROTOCOL = 33
MSP_OPTIONS = 0 (mode de sondage)
Relais (PINIO)
PINIO1, pad PIO1, niveau bas par défaut
PINIO2, Commutateur de caméra, C1 ALLUMÉ par défaut
#
PA4 PINIO1 SORTIE GPIO(81) BAS //Pad PIO1
PB5 PINIO2 SORTIE GPIO(82) BAS //interrupteur de la caméra
# RCx_OPTION: Option d'entrée RC
28 Relais Marche/Arrêt
34 Relais2 Activé/Désactivé
35 Relais3 On/Off
36 Relais4 Marche/Arrêt
par exemple
RELAY_PIN 81 //PIO1 GPIO
RC7_OPTION 28 //Relais Marche/Arrêt, Utilisez CH7 de l'émetteur pour contrôler le niveau bas/haut de PIO1
RELAY_PIN2 82 //Interrupteur de caméra GPIO
RC8_OPTION 34 //Relais2 On/Off, utilisez CH8 de l'émetteur pour contrôler le niveau haut/bas sur le tampon PB5
La fonction configurée sera déclenchée lorsque la valeur pwm de l'interrupteur auxiliaire devient supérieure à 1800. Elle sera désactivée lorsque la valeur tombe en dessous de 1200.
Vérifiez la valeur pwm envoyée par l'émetteur lorsque le commutateur est en position haute et basse en utilisant l'écran de calibration radio dans la configuration initiale >> Matériel obligatoire >> Planificateur de mission. Si elle ne dépasse pas 1800 ou ne descend pas en dessous de 1200,il est préférable d'ajuster les points d'extrémité du servo dans l'émetteur.
Conseils
F405-VTOL a INAV fw préchargé pour QC
La cible MATEKF405TE_SD n'est pas répertoriée dans INAV Configurator 4.x.x, elle est prise en charge par INAV5.0 ou ultérieur
ArduPilot fw, 'Erreurs internes 0x4000 l:213 spi_fail' avertissement, veuillez définir LOG_BACKEND_TYPE = 1 (Fichier) pour l'enregistrement sur la carte SD.