Des détails précis:
L298N L298P Module de pilote de moteur à double canal 4A Motor Shield R3 Pour
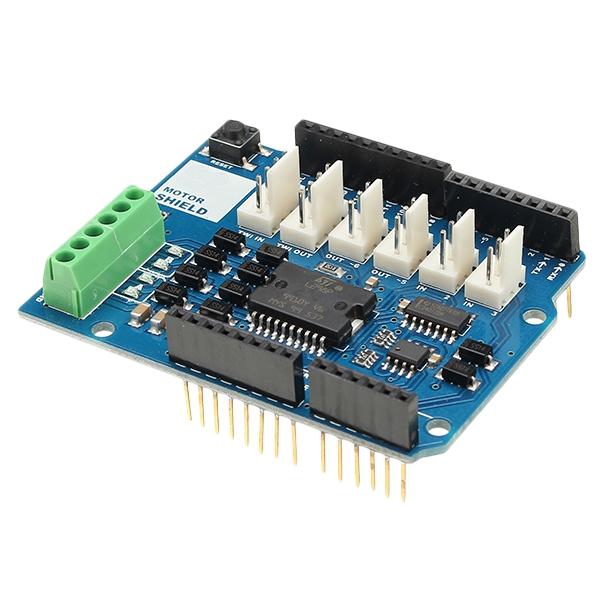
Description: Le Shield Motor est basé sur le L298, qui est un double pilote de pont complet conçu pour piloter des charges inductives telles que des relais, des solénoïdes, des moteurs CC et pas à pas. Il vous permet de piloter deux moteurs CC avec votre carte, contrôlant la vitesse et la direction de chacun indépendamment. Vous pouvez également mesurer l'absorption de courant du moteur de chaque moteur, entre autres fonctionnalités. Le shield est
TinkerKit compatible, ce qui signifie que vous pouvez rapidement créer des projets en les branchant
TinkerKit modules sur la carte.
Fonctionnalité: - Tension de travail: 5V ~ 12V
- Contrôleur de moteur:
L298Ppilote 2 moteurs à courant continu ou 1 moteur pas à pas
- Courant maximal : 2A par canal ou 4A maximum (avec alimentation externe)
- Détection de courant : 1,65V/A
- Fonction d'arrêt et de freinage en course libre
À propos du pouvoir: Le Motor Shield doit être alimenté uniquement par une alimentation externeParce que le circuit intégré L298 monté sur le shield dispose de deux connexions d'alimentation distinctes, une pour la logique et une pour le pilote d'alimentation du moteur. Le courant moteur requis dépasse souvent la limite de courant USB maximale.
L'alimentation externe (non USB) peut provenir soit d'un adaptateur secteur (wall-wart) CA-CC, soit d'une batterie. L'adaptateur peut être connecté en branchant une fiche centrale positive de 2,1 mm dans la prise d'alimentation de la carte où est monté le shield du moteur, ou en connectant les fils qui mènent l'alimentation aux bornes à vis Vin et GND, en veillant à respecter les polarités.
Pour éviter d'éventuels dommages à la carte sur laquelle le bouclier est monté,
Nous vous recommandons d'utiliser une alimentation externe fournissant une tension entre 7 et 12VSi votre moteur nécessite plus de 9V, nous recommandons de séparer le câble d'alimentation du shield et de la carte sur laquelle le shield est monté. Cela est possible en coupant le cavalier "Vin Connect" placé sur le côté arrière du shield.
La limite absolue pour Vin au niveau des bornes à vis est de 18V.
Les broches d'alimentation sont les suivantes:
Vin sur la borne à vis, la tension d'entrée du moteur est connectée au blindage. Une alimentation externe connectée à cette broche fournit également de l'énergie à la carte sur laquelle elle est montée. En coupant le pont "Vin Connect", vous créez un câble d'alimentation dédié pour le moteur.
GND Mettre à la terre sur le bornier à vis.
Le bouclier peut fournir 2 ampères par canal, pour un total de 4 ampères maximum. À propos de l'entrée et de la sortie: Ce bouclier dispose de deux canaux distincts, appelés A et B, qui utilisent chacun 4 des broches pour piloter ou détecter le moteur. Au total, il y a 8 broches utilisées sur ce bouclier. Vous pouvez utiliser chaque canal séparément pour piloter deux moteurs à courant continu ou les combiner pour piloter un moteur pas à pas unipolaire.
Les épingles du bouclier, divisées par canal, sont indiquées dans le tableau ci-dessous:
| Fonction | épingles par Ch. A | broches par Ch. B |
| Direction | D12 | D13 |
| PWM | D3 | D11 |
| Frein | D9 | D8 |
| Détection de courant | A0 | A1 |
Si vous n'avez pas besoin du frein et de la détection du courant et que vous avez également besoin de plus de broches pour votre application, vous pouvez désactiver ces fonctionnalités en coupant les cavaliers respectifs à l'arrière du shield.
Les prises supplémentaires sur le bouclier sont décrites comme suit:
Bornier à vis pour connecter les moteurs et leur alimentation électrique.
2 connecteurs TinkerKit pour deux Entrées Analogiques (en blanc), connectés à A2 et A3.
2 connecteurs TinkerKit pour deux sorties analogiques (en orange au milieu), connectés aux sorties PWM sur les broches D5 et D6.
2 connecteurs TinkerKit pour l'interface TWI (en blanc avec 4 broches), un pour l'entrée et l'autre pour la sortie. Connexions des moteurs: Moteur à courant continu avec balais. Vous pouvez entraîner deux moteurs à courant continu avec balais en connectant les deux fils de chacun aux bornes de vis (+) et (-) pour chaque canal A et B. De cette manière, vous pouvez contrôler sa direction en réglant les broches DIR A et DIR B sur HIGH ou LOW, vous pouvez contrôler la vitesse en variant les valeurs du rapport cyclique PWM A et PWM B. Les broches Frein A et Frein B, si elles sont réglées sur HIGH, freinent efficacement les moteurs à courant continu au lieu de les laisser ralentir en coupant l'alimentation. Vous pouvez mesurer le courant traversant le moteur à courant continu en lisant les broches SNS0 et SNS1. Sur chaque canal, il y aura une tension proportionnelle au courant mesuré, qui peut être lue comme une entrée analogique normale, via la fonction analogRead() sur les entrées analogiques A0 et A1. Pour votre commodité, il est calibré pour être à 3,3V lorsque le canal délivre son courant maximal possible, c'est-à-dire 2A.
Forfait inclus: 1 x Module de pilote de moteur