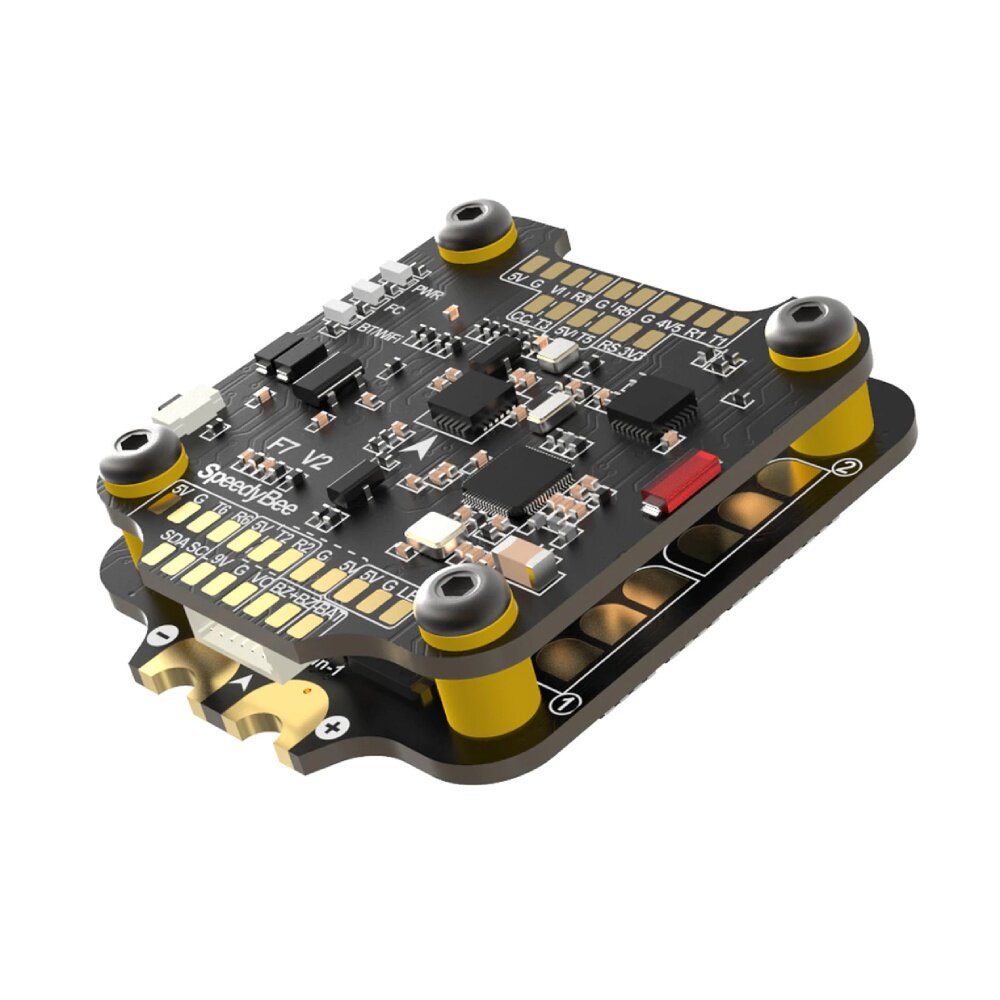
MCU: STM32F722 IMU: MPU6000 USB: Type-C Baro: BMP280 (I2C) OSD: BetaFlight OSD avec puce AT7456E BLE: Support, utilisé pour la configuration du contrôleur de vol WiFi: Support, utilisé pour le transfert de données, par exemple, le flash du firmware et l'analyse de la Boîte noire. Emplacement DJI Air Unit : un emplacement JST complet pour DJI Air Unit à bord BlackBox: 16 Mo de mémoire flash embarquée Capteur actuel: 1 : 10 (Échelle 168) BetaFlight Panneau de contrôle de la caméra: Oui Entrée d'alimentation: 3S - 6S Lipo Sortie d'alimentation 5V Sortie de 7 * 5V, 6 pads et un pad BZ+ utilisé pour le buzzer, le courant de charge maximal est de 2.5A. 9V * 1 le courant maximum de charge est de 2.5A. Sortie de puissance 9V 2 * sortie 9V, 1 tampons et une autre utilisée pour l'emplacement DJI Sortie de puissance 4.5V : 1 * patte de sortie 4.5V Sortie d'alimentation de 3,3V: 1 * patte de sortie, le courant de charge maximum est de 500 mA. Signal ESC: M1 - M4 UART: UART complet * 5 (UART1, UART2, UART3, UART5, UART6) Télémétrie UART: RX UART4 I2C: Utilisé pour magnétomètre externe, sonar, etc. PIN LED Utilisé pour les LED WS2812 Buzzer : utilisez les pads BZ+ et BZ- pour le buzzer 5V Bouton de démarrage : Utilisé pour entrer facilement en mode DFU Entrée RSSI: patte de soudure d'entrée RSSI SmartPort: Utilisez n'importe quel port TX de UART pour la fonction SmartPort. Firmware pris en charge par le contrôleur de vol : BetaFlight (par défaut), EMUFlight Nom de cible: SPEEDYBEEF7V2 Montage : 30,5 x 30,5 mm, taille du trou de 4 mm Dimension: 41 x 38 x 6,9mm Poids: 9g |